Autonomous Line Following Robot
Oct 2024 - Dec 2024 | UBC
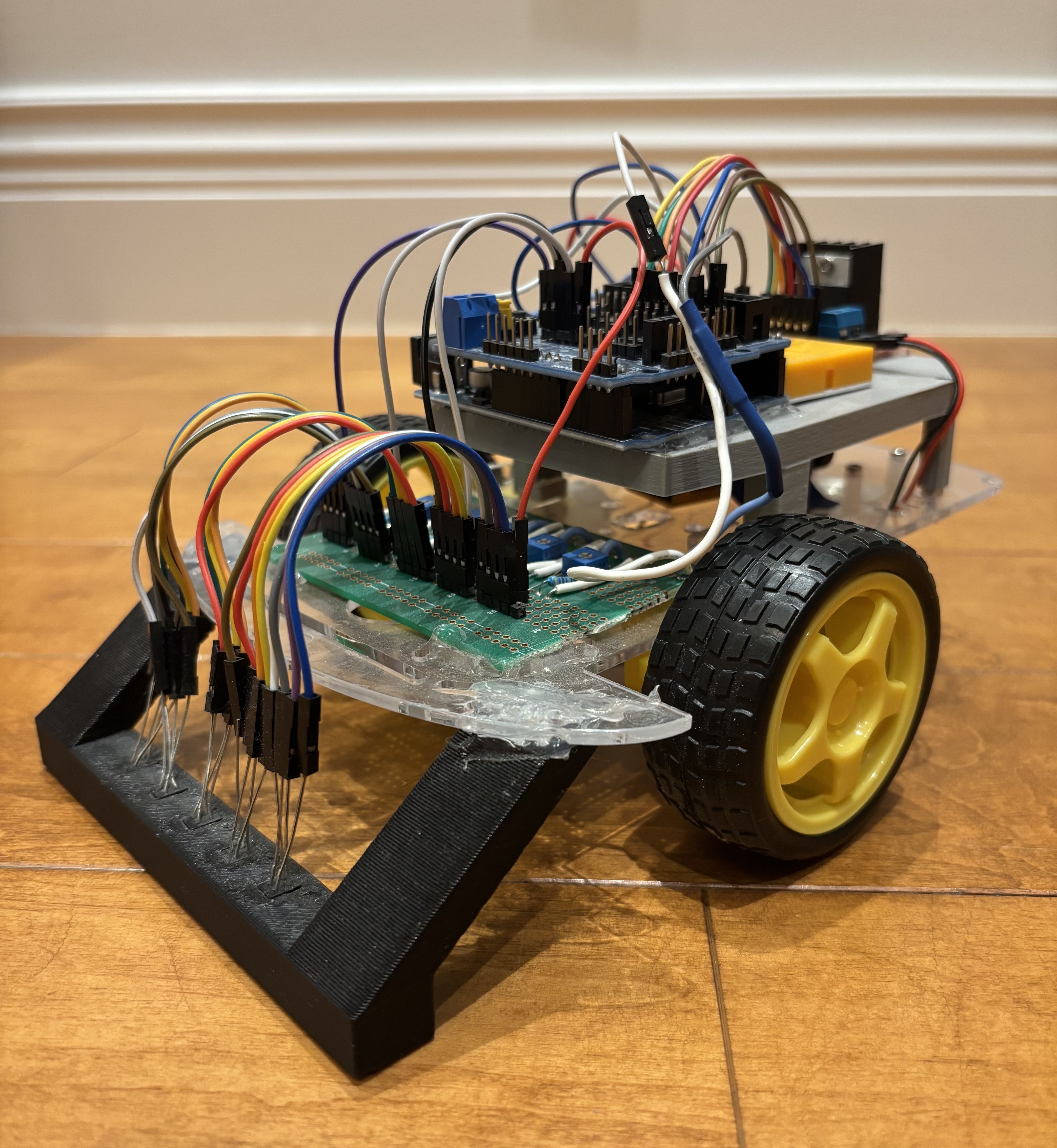
Developed a fully autonomous robot in C capable of precise 90-degree turns using 5 reflective sensors. The robot was designed to follow a line path with high accuracy and reliability.
Designed a custom 3D-printed sensor holder in OnShape to optimize sensor placement and improve detection accuracy. The holder was iterated multiple times to achieve the best performance.
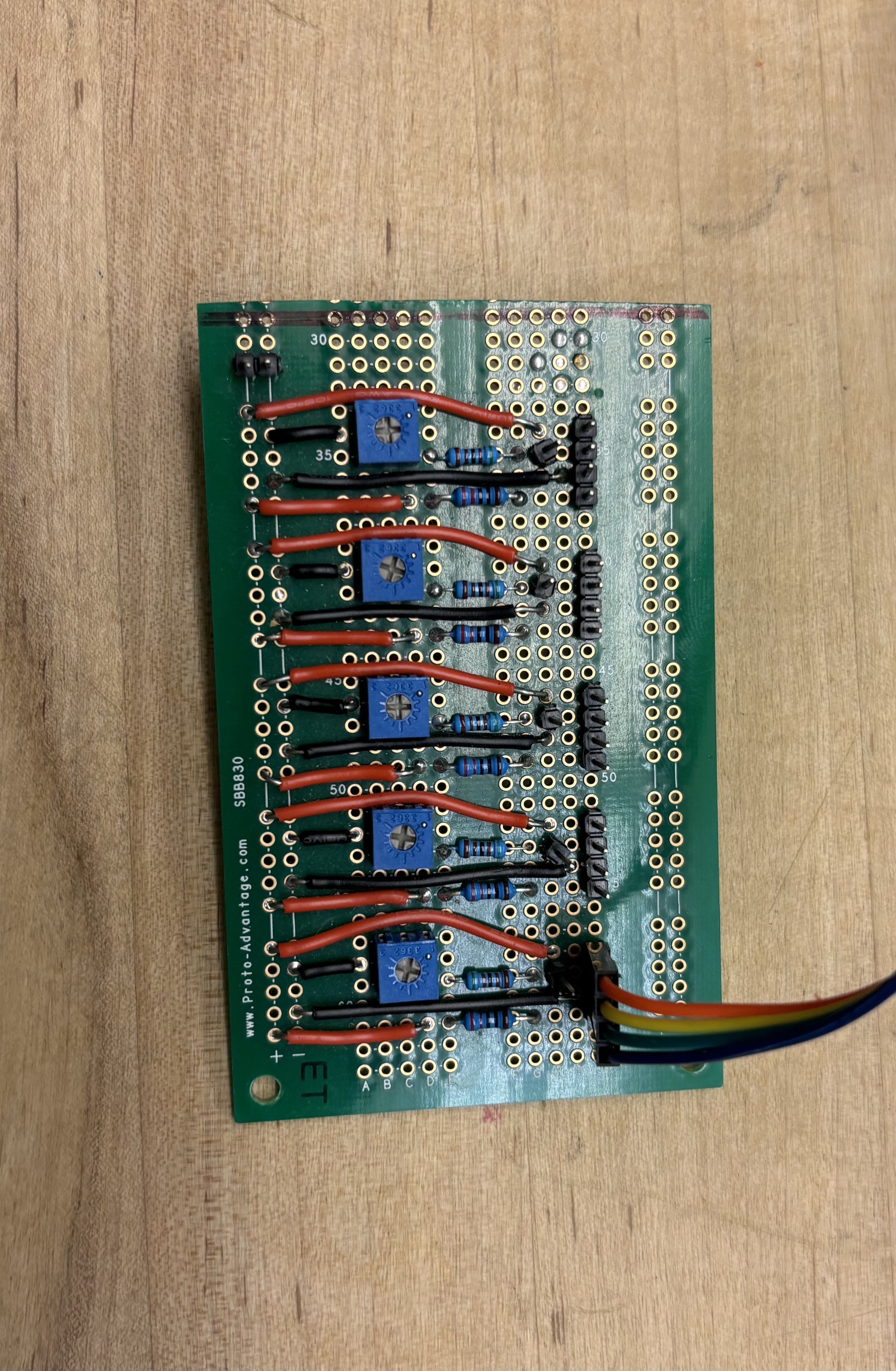
Optimized the circuit design and sensor calibration, resulting in a 20% improvement in tracking accuracy. This project strengthened my skills in embedded programming, circuit design, and rapid prototyping.